目录
- 概述
- 思路
- 代码示例
- 位置定义
- 方向定义
- 估值函数
- 节点定义
- 算法上下文定义
- 寻路算法
- 初始化
- 获取路径
- 寻路
- 完整代码
概述
AStar算法是一种图形搜索算法,常用于寻路。他是以广度优先搜索为基础,集Dijkstra算法和最佳优先(best fit)于一身的一种算法。
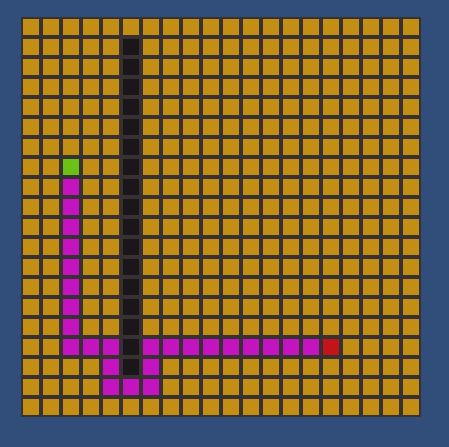
示例1:4向
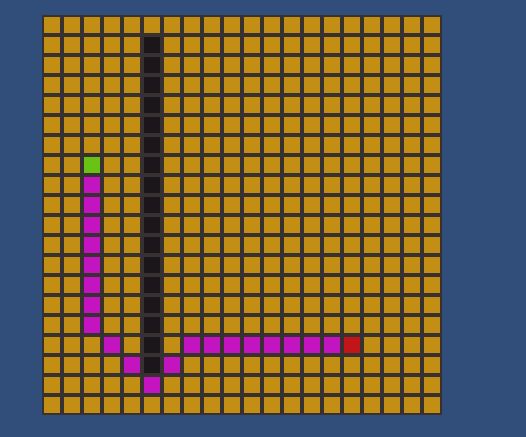
示例2:8向
思路
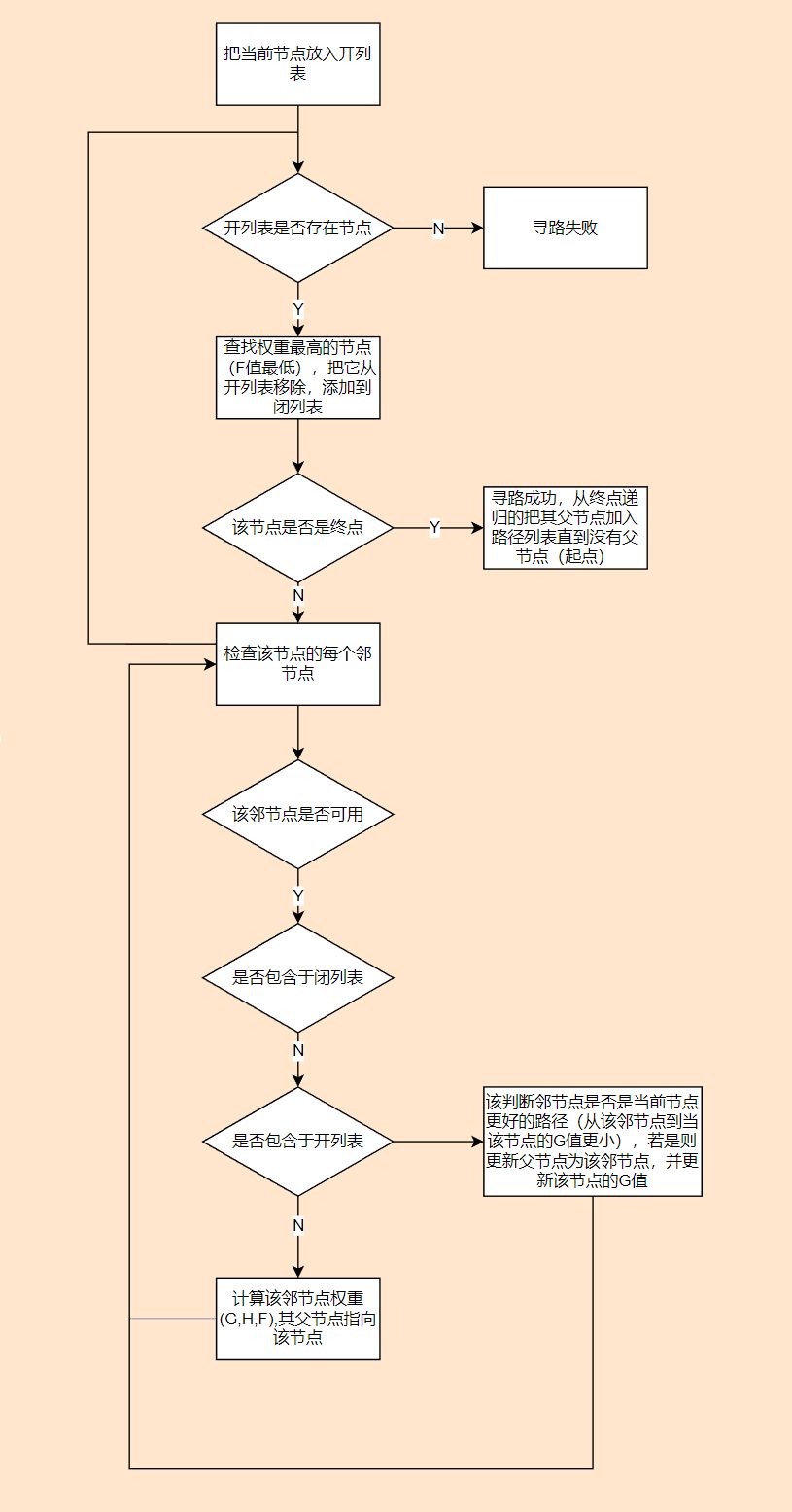
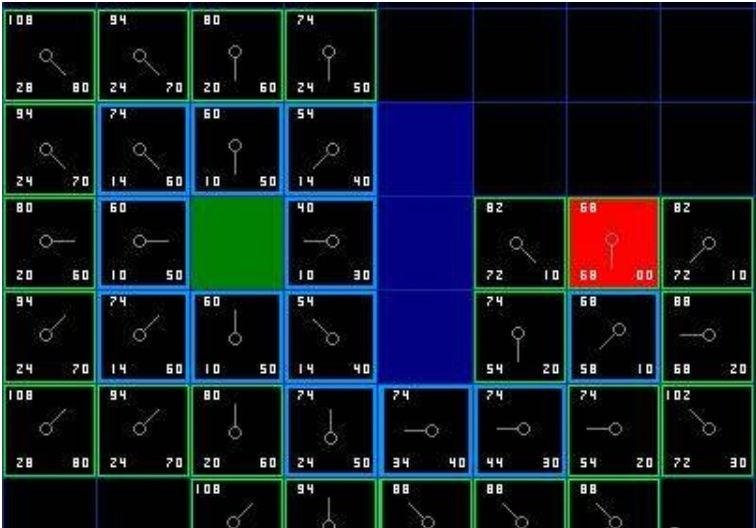
递归的通过估值函数找到最佳路径,估值函数与距离相关,也有可能与通过代价系数相关(例如平地系数为1,坡地系数为2),有三个参数:
- G:起点点到当前点的代价
- H: 当前点到终点的代价
- F: F = G + H 与最佳路径权重负相关的参数
过程大概:
代码示例
位置定义
| public struct Vec | |
| { | |
| public int x; | |
| public int y; | |
| public Vec(int x, int y) | |
| { | |
| this.x = x; | |
| this.y = y; | |
| } | |
| public static Vec Zero | |
| { | |
| get | |
| { | |
| return new Vec(0, 0); | |
| } | |
| } | |
| public override bool Equals(object obj) | |
| { | |
| if (!(obj is Vec)) | |
| return false; | |
| var o = (Vec)obj; | |
| return x == o.x && y == o.y; | |
| } | |
| public override int GetHashCode() | |
| { | |
| return x.GetHashCode() + y.GetHashCode(); | |
| } | |
| public static Vec operator +(Vec2 a, Vec2 b) | |
| { | |
| return new Vec(a.x + b.x, a.y + b.y); | |
| } | |
| public static Vec operator *(Vec2 a, int n) | |
| { | |
| return new Vec(a.x * n, a.y * n); | |
| } | |
| public static Vec operator *(int n, Vec2 a) | |
| { | |
| return new Vec(a.x * n, a.y * n); | |
| } | |
| public static bool operator ==(Vec a, Vec2 b) | |
| { | |
| return a.x == b.x && a.y == b.y; | |
| } | |
| public static bool operator !=(Vec a, Vec2 b) | |
| { | |
| return !(a.x == b.x && a.y == b.y); | |
| } | |
| } |
方向定义
| public enum EDir | |
| { | |
| Up =, | |
| Down =, | |
| Left =, | |
| Right =, | |
| UpLeft =, | |
| UpRight =, | |
| DownLeft =, | |
| DownRight =, | |
| } | |
| public abstract class CheckDirPol | |
| { | |
| abstract public Dictionary<EDir, Vec> GetDir(); | |
| } | |
| public class CheckDirPol : CheckDirPol | |
| { | |
| private Dictionary<EDir, Vec> dirDict = new Dictionary<EDir, Vec2> | |
| { | |
| {EDir.Up, new Vec(0, 1) }, | |
| {EDir.Down, new Vec(0, -1) }, | |
| {EDir.Left, new Vec(-1, 0) }, | |
| {EDir.Right, new Vec(1, 0) }, | |
| }; | |
| override public Dictionary<EDir, Vec> GetDir() | |
| { | |
| return dirDict; | |
| } | |
| } | |
| public class CheckDirPol : CheckDirPol | |
| { | |
| private Dictionary<EDir, Vec> dirDict = new Dictionary<EDir, Vec2> | |
| { | |
| {EDir.Up, new Vec(0, 1) }, | |
| {EDir.Down, new Vec(0, -1) }, | |
| {EDir.Left, new Vec(-1, 0) }, | |
| {EDir.Right, new Vec(1, 0) }, | |
| {EDir.UpLeft, new Vec(-1, 1) }, | |
| {EDir.UpRight, new Vec(1, 1) }, | |
| {EDir.DownLeft, new Vec(-1, -1) }, | |
| {EDir.DownRight, new Vec(1, -1) }, | |
| }; | |
| override public Dictionary<EDir, Vec> GetDir() | |
| { | |
| return dirDict; | |
| } | |
| } |
运用策略模式的技巧,以实现4向,8向搜索切换
估值函数
| public abstract class EvaPol | |
| { | |
| abstract public float Calc(Vec a, Vec2 b); | |
| } | |
| public class MANEvaPol : EvaPol | |
| { | |
| override public float Calc(Vec a, Vec2 b) | |
| { | |
| return Mathf.Abs(a.x - b.x) + Mathf.Abs(a.y - b.y); | |
| } | |
| } |
直接使用曼哈顿距离作为代价
节点定义
| public class Node | |
| { | |
| public int id; | |
| public Vec pos; | |
| public float g; | |
| public float h; | |
| public float f; | |
| public Vec prePos; | |
| public bool hasPrePos; | |
| public Node(Vec pos) | |
| { | |
| this.pos = pos; | |
| } | |
| public void SetPrePos(Vec pos) | |
| { | |
| prePos = pos; | |
| hasPrePos = true; | |
| } | |
| } |
算法上下文定义
| Context context; | |
| EvaPol disPol; | |
| CheckDirPol checkDirPol; | |
| public struct Context | |
| { | |
| public Vec end; | |
| public Vec start; | |
| public Node[,] nodes; | |
| public List<Node> open; | |
| public List<Node> close; | |
| public int[,] map; | |
| public List<Vec> result; | |
| public Vec size; | |
| } |
寻路算法
初始化
| public void Init(Vec start, Vec2 end, int[,] map) | |
| { | |
| var x = map.GetLength(); | |
| var y = map.GetLength(); | |
| context = new Context() | |
| { | |
| start = start, | |
| end = end, | |
| open = new List<Node>(), | |
| close = new List<Node>(), | |
| map = map, | |
| result = new List<Vec>(), | |
| size = new Vec(x, y), | |
| }; | |
| context.nodes = new Node[x, y]; | |
| for (int i =; i < x; i++) | |
| for (int j =; j < x; j++) | |
| context.nodes[i, j] = new Node(new Vec(i, j)); | |
| disPol = new MANEvaPol(); | |
| //checkDirPol = new CheckDirPol(); | |
| checkDirPol = new CheckDirPol(); | |
| } |
获取路径
| public List<Vec> GetResult() | |
| { | |
| return context.result; | |
| } |
寻路
寻路入口
| public void FindPath() | |
| { | |
| var s = context.start; | |
| var sn = context.nodes[s.x, s.y]; | |
| sn.g =; | |
| sn.h = disPol.Calc(s, context.end); | |
| sn.f = sn.g + sn.h; | |
| context.open.Add(sn); | |
| FindArrangement(sn); | |
| } |
递归函数
| void FindArrangement(Node node) | |
| { | |
| context.close.Add(node); | |
| context.open.Remove(node); | |
| if (node.pos == context.end) | |
| { | |
| SetResult(node); | |
| return; | |
| } | |
| CheckRound(node); | |
| if (context.open.Count ==) | |
| return; | |
| Node next = context.open[]; | |
| for (int i =; i < context.open.Count; i++) | |
| if (context.open[i].f < next.f) | |
| next = context.open[i]; | |
| FindArrangement(next); | |
| } |
检查周围节点
| void CheckRound(Node node) | |
| { | |
| var dirDict = checkDirPol.GetDir(); | |
| foreach (var pair in dirDict) | |
| { | |
| var dir = node.pos + pair.Value; | |
| if (IsBlock(dir)) | |
| continue; | |
| var dn = context.nodes[dir.x, dir.y]; | |
| if (context.close.Contains(dn)) | |
| continue; | |
| if (context.open.Contains(dn)) | |
| TryOverridePath(node, dn); | |
| else | |
| { | |
| dn.g = disPol.Calc(dn.pos, context.start); | |
| dn.h = disPol.Calc(dn.pos, context.end); | |
| dn.f = dn.g + dn.h; | |
| dn.SetPrePos(node.pos); | |
| context.open.Add(dn); | |
| } | |
| } | |
| } | |
| // 若是从邻节点到该节点路径更优,则替换更新 | |
| void TryOverridePath(Node a, Node b) | |
| { | |
| var g = a.g + disPol.Calc(a.pos, b.pos); | |
| if (g < b.g) | |
| { | |
| b.g = g; | |
| b.SetPrePos(a.pos); | |
| } | |
| } | |
| bool IsBlock(Vec pos) | |
| { | |
| return !InMap(pos) || context.map[pos.x, pos.y] ==; | |
| } | |
| bool InMap(Vec pos) | |
| { | |
| var x = pos.x; | |
| var y = pos.y; | |
| var size = context.size; | |
| return x >= && x < size.x && y >= 0 && y < size.y; | |
| } |
生成路径
| void SetResult(Node node) | |
| { | |
| Queue<Node> q = new Queue<Node>(); | |
| while(node.hasPrePos) | |
| { | |
| q.Enqueue(node); | |
| node = context.nodes[node.prePos.x, node.prePos.y]; | |
| } | |
| while(q.Count >) | |
| { | |
| context.result.Add(q.Dequeue().pos); | |
| } | |
| } |
完整代码
| using System.Collections; | |
| using System.Collections.Generic; | |
| using UnityEngine; | |
| public struct Vec | |
| { | |
| public int x; | |
| public int y; | |
| public Vec(int x, int y) | |
| { | |
| this.x = x; | |
| this.y = y; | |
| } | |
| public static Vec Zero | |
| { | |
| get | |
| { | |
| return new Vec(0, 0); | |
| } | |
| } | |
| public override bool Equals(object obj) | |
| { | |
| if (!(obj is Vec)) | |
| return false; | |
| var o = (Vec)obj; | |
| return x == o.x && y == o.y; | |
| } | |
| public override int GetHashCode() | |
| { | |
| return x.GetHashCode() + y.GetHashCode(); | |
| } | |
| public static Vec operator +(Vec2 a, Vec2 b) | |
| { | |
| return new Vec(a.x + b.x, a.y + b.y); | |
| } | |
| public static Vec operator *(Vec2 a, int n) | |
| { | |
| return new Vec(a.x * n, a.y * n); | |
| } | |
| public static Vec operator *(int n, Vec2 a) | |
| { | |
| return new Vec(a.x * n, a.y * n); | |
| } | |
| public static bool operator ==(Vec a, Vec2 b) | |
| { | |
| return a.x == b.x && a.y == b.y; | |
| } | |
| public static bool operator !=(Vec a, Vec2 b) | |
| { | |
| return !(a.x == b.x && a.y == b.y); | |
| } | |
| } | |
| public enum EDir | |
| { | |
| Up =, | |
| Down =, | |
| Left =, | |
| Right =, | |
| UpLeft =, | |
| UpRight =, | |
| DownLeft =, | |
| DownRight =, | |
| } | |
| public class AstarFindPath | |
| { | |
| public class Node | |
| { | |
| public int id; | |
| public Vec pos; | |
| public float g; | |
| public float h; | |
| public float f; | |
| public Vec prePos; | |
| public bool hasPrePos; | |
| public Node(Vec pos) | |
| { | |
| this.pos = pos; | |
| } | |
| public void SetPrePos(Vec pos) | |
| { | |
| prePos = pos; | |
| hasPrePos = true; | |
| } | |
| } | |
| public abstract class EvaPol | |
| { | |
| abstract public float Calc(Vec a, Vec2 b); | |
| } | |
| public class MANEvaPol : EvaPol | |
| { | |
| override public float Calc(Vec a, Vec2 b) | |
| { | |
| return Mathf.Abs(a.x - b.x) + Mathf.Abs(a.y - b.y); | |
| } | |
| } | |
| public abstract class CheckDirPol | |
| { | |
| abstract public Dictionary<EDir, Vec> GetDir(); | |
| } | |
| public class CheckDirPol : CheckDirPol | |
| { | |
| private Dictionary<EDir, Vec> dirDict = new Dictionary<EDir, Vec2> | |
| { | |
| {EDir.Up, new Vec(0, 1) }, | |
| {EDir.Down, new Vec(0, -1) }, | |
| {EDir.Left, new Vec(-1, 0) }, | |
| {EDir.Right, new Vec(1, 0) }, | |
| }; | |
| override public Dictionary<EDir, Vec> GetDir() | |
| { | |
| return dirDict; | |
| } | |
| } | |
| public class CheckDirPol : CheckDirPol | |
| { | |
| private Dictionary<EDir, Vec> dirDict = new Dictionary<EDir, Vec2> | |
| { | |
| {EDir.Up, new Vec(0, 1) }, | |
| {EDir.Down, new Vec(0, -1) }, | |
| {EDir.Left, new Vec(-1, 0) }, | |
| {EDir.Right, new Vec(1, 0) }, | |
| {EDir.UpLeft, new Vec(-1, 1) }, | |
| {EDir.UpRight, new Vec(1, 1) }, | |
| {EDir.DownLeft, new Vec(-1, -1) }, | |
| {EDir.DownRight, new Vec(1, -1) }, | |
| }; | |
| override public Dictionary<EDir, Vec> GetDir() | |
| { | |
| return dirDict; | |
| } | |
| } | |
| public struct Context | |
| { | |
| public Vec end; | |
| public Vec start; | |
| public Node[,] nodes; | |
| public List<Node> open; | |
| public List<Node> close; | |
| public int[,] map; | |
| public List<Vec> result; | |
| public Vec size; | |
| } | |
| Context context; | |
| EvaPol disPol; | |
| CheckDirPol checkDirPol; | |
| public void Init(Vec start, Vec2 end, int[,] map) | |
| { | |
| var x = map.GetLength(); | |
| var y = map.GetLength(); | |
| context = new Context() | |
| { | |
| start = start, | |
| end = end, | |
| open = new List<Node>(), | |
| close = new List<Node>(), | |
| map = map, | |
| result = new List<Vec>(), | |
| size = new Vec(x, y), | |
| }; | |
| context.nodes = new Node[x, y]; | |
| for (int i =; i < x; i++) | |
| for (int j =; j < x; j++) | |
| context.nodes[i, j] = new Node(new Vec(i, j)); | |
| disPol = new MANEvaPol(); | |
| //checkDirPol = new CheckDirPol(); | |
| checkDirPol = new CheckDirPol(); | |
| } | |
| public void FindPath() | |
| { | |
| var s = context.start; | |
| var sn = context.nodes[s.x, s.y]; | |
| sn.g =; | |
| sn.h = disPol.Calc(s, context.end); | |
| sn.f = sn.g + sn.h; | |
| context.open.Add(sn); | |
| FindArrangement(sn); | |
| } | |
| public List<Vec> GetResult() | |
| { | |
| return context.result; | |
| } | |
| void FindArrangement(Node node) | |
| { | |
| context.close.Add(node); | |
| context.open.Remove(node); | |
| if (node.pos == context.end) | |
| { | |
| SetResult(node); | |
| return; | |
| } | |
| CheckRound(node); | |
| if (context.open.Count ==) | |
| return; | |
| Node next = context.open[]; | |
| for (int i =; i < context.open.Count; i++) | |
| if (context.open[i].f < next.f) | |
| next = context.open[i]; | |
| FindArrangement(next); | |
| } | |
| void SetResult(Node node) | |
| { | |
| Queue<Node> q = new Queue<Node>(); | |
| while(node.hasPrePos) | |
| { | |
| q.Enqueue(node); | |
| node = context.nodes[node.prePos.x, node.prePos.y]; | |
| } | |
| while(q.Count >) | |
| { | |
| context.result.Add(q.Dequeue().pos); | |
| } | |
| } | |
| void CheckRound(Node node) | |
| { | |
| var dirDict = checkDirPol.GetDir(); | |
| foreach (var pair in dirDict) | |
| { | |
| var dir = node.pos + pair.Value; | |
| if (IsBlock(dir)) | |
| continue; | |
| var dn = context.nodes[dir.x, dir.y]; | |
| if (context.close.Contains(dn)) | |
| continue; | |
| if (context.open.Contains(dn)) | |
| TryOverridePath(node, dn); | |
| else | |
| { | |
| dn.g = disPol.Calc(dn.pos, context.start); | |
| dn.h = disPol.Calc(dn.pos, context.end); | |
| dn.f = dn.g + dn.h; | |
| dn.SetPrePos(node.pos); | |
| context.open.Add(dn); | |
| } | |
| } | |
| } | |
| void TryOverridePath(Node a, Node b) | |
| { | |
| var g = a.g + disPol.Calc(a.pos, b.pos); | |
| if (g < b.g) | |
| { | |
| b.g = g; | |
| b.SetPrePos(a.pos); | |
| } | |
| } | |
| bool IsBlock(Vec pos) | |
| { | |
| return !InMap(pos) || context.map[pos.x, pos.y] ==; | |
| } | |
| bool InMap(Vec pos) | |
| { | |
| var x = pos.x; | |
| var y = pos.y; | |
| var size = context.size; | |
| return x >= && x < size.x && y >= 0 && y < size.y; | |
| } | |
| } |